背景知识 1995年,受到鸟群觅食行为 的规律性启发,James Kennedy和Russell Eberhart建立了一个简化算法模型,经过多年改进最终形成了粒子群优化算法(Particle Swarm Optimization, PSO) ,也可称为粒子群算法。
特点 粒子群算法具有收敛速度快、参数少、算法简单易实现 的优点(对高维度优化问题,比遗传算法更快收敛于最优解),但是也会存在陷入局部最优解 的问题
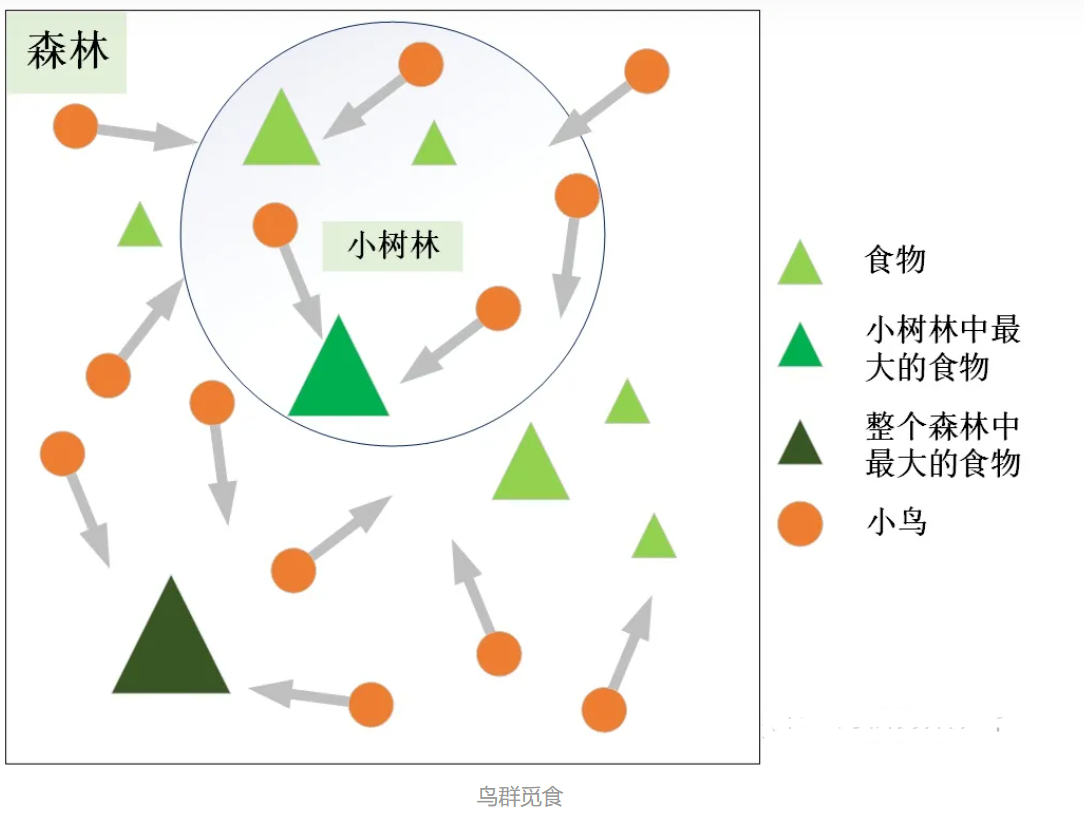
基本思想 粒子群算法的思想源于对鸟群觅食行为的研究,鸟群通过集体的信息共享 使群体找到最优的目的地。如下图,设想这样一个场景:鸟群在森林中随机搜索食物,它们想要找到食物量最多的位置。但是所有的鸟都不知道食物具体在哪个位置,只能感受到食物大概在哪个方向。每只鸟沿着自己判定的方向进行搜索,并在搜索的过程中记录自己曾经找到过食物且量最多的位置* ,同时所有的鸟都共享自己每一次发现食物的位置以及食物的量,这样鸟群就知道当前在哪个位置食物的量最多。在搜索的过程中每只鸟都会根据自己记忆中食物量最多的位置和当前鸟群记录的食物量最多的位置调整自己接下来搜索的方向 。鸟群经过一段时间的搜索后就可以找到森林中哪个位置的食物量最多(全局最优解)。
算法的基本原理 将鸟群觅食行为和算法原理对应,如下图:
鸟群觅食
粒子群算法
鸟
粒子
森林
求解空间
食物的量
目标函数值(适应值)
每只鸟所处的位置
空间中的一个解(粒子位置)
食物量最多的地方
全局最优解
PSO的基础:信息的社会共享
粒子的两个属性:速度和位置(算法的两个核心要素)
速度表示粒子下一步迭代时移动的方向和距离,位置是所求解问题的一个解。
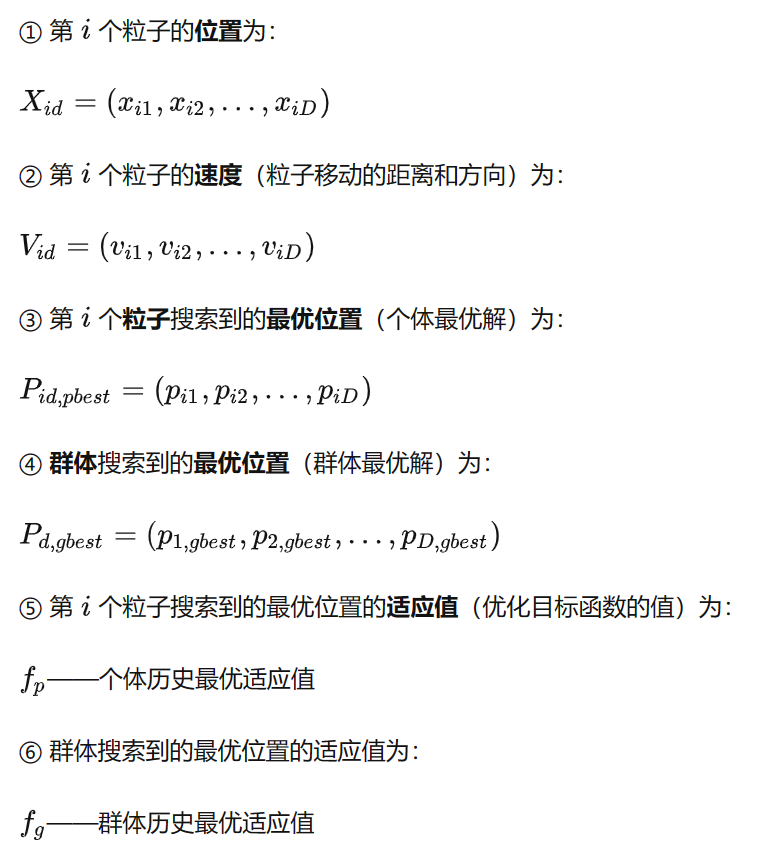
算法的6个重要参数
假设在 D 维搜索空间中,有 N 个粒子,每个粒子代表一个解,则:
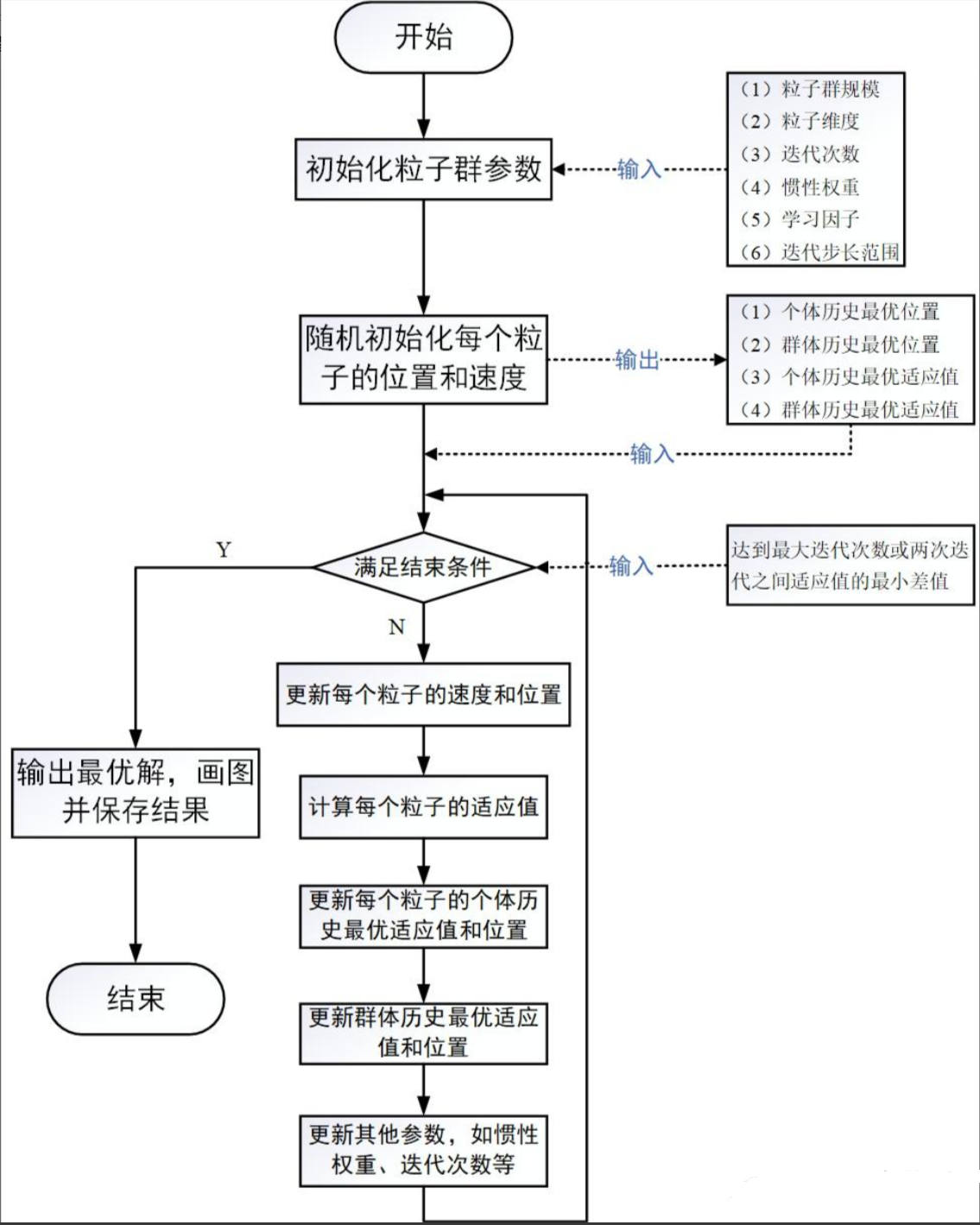
粒子群算法的流程图
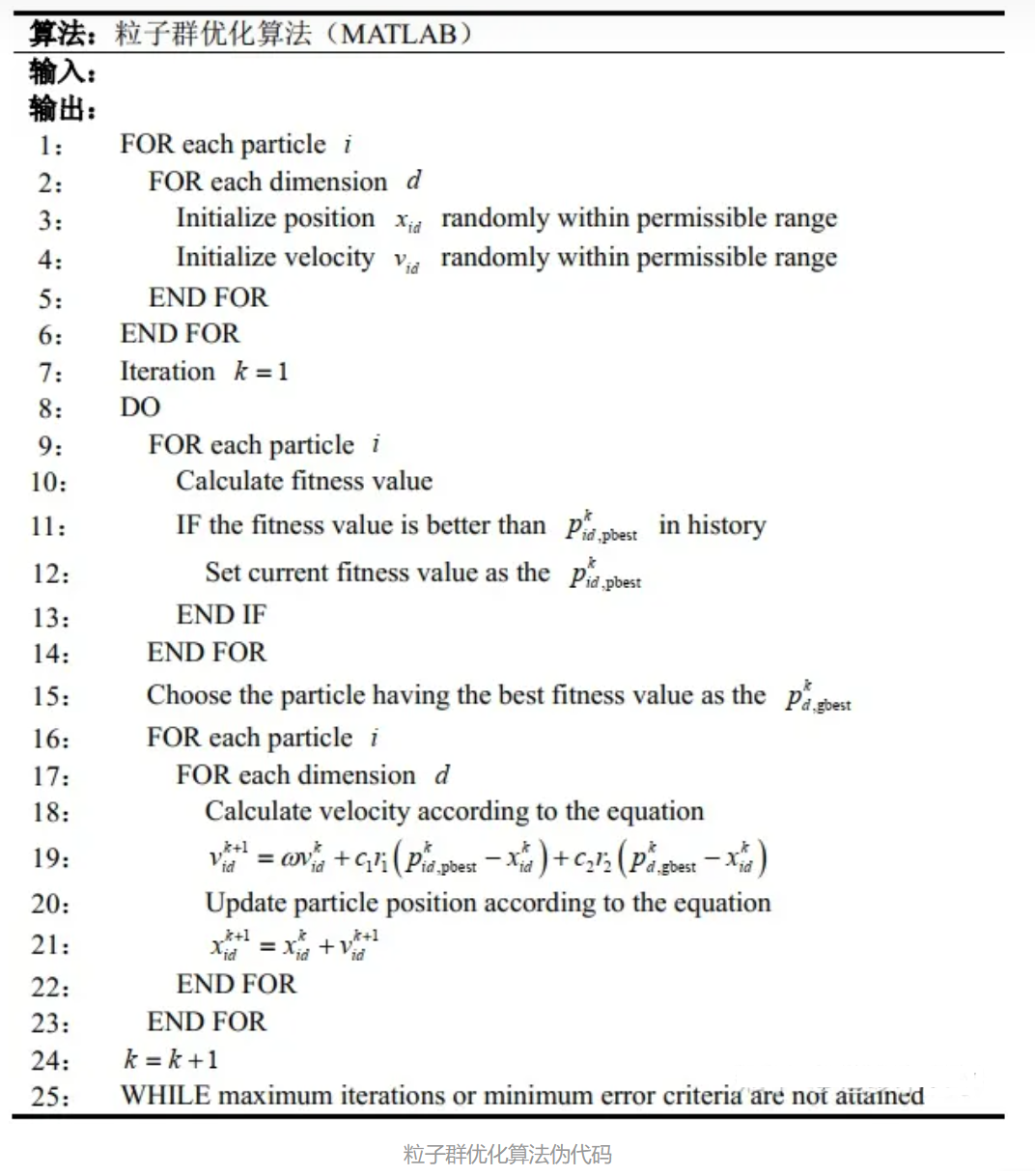
伪代码
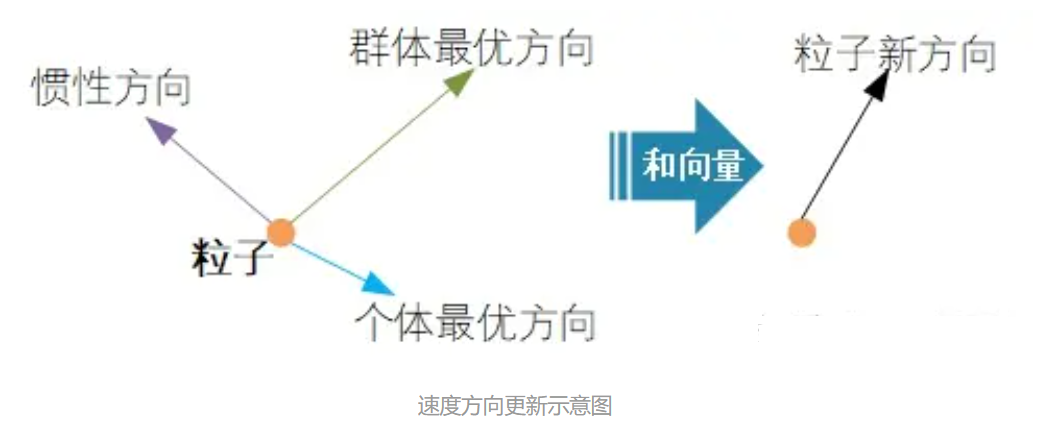
速度更新公式 表述上叫速度,实际上就是粒子下一步迭代移动的距离和方向,也就是一个位置向量。
速度更新公式的解释 ① 第一项:惯性部分
由惯性权重和粒子自身速度构成,表示粒子对先前自身运动状态的信任。
② 第二项:认知部分
表示粒子本身的思考,即粒子自己经验的部分,可理解为粒子当前位置与自身历史最优位置之间的距离和方向。
③ 第三项:社会部分
表示粒子之间的信息共享与合作,即来源于群体中其他优秀粒子的经验,可理解为粒子当前位置与群体历史最优位置之间的距离和方向。
速度更新公式的参数定义
速度的方向 粒子下一步迭代的移动方向 = 惯性方向 + 个体最优方向 + 群体最优方向
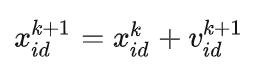
位置更新公式 上一步的位置 + 下一步的速度
算法参数解释
粒子群规模 N :
一个正整数,推荐取值范围:[20,1000],简单问题一般取20~40,较难或特定类别的问题可以取100~200。较小的种群规模容易陷入局部最优;较大的种群规模可以提高收敛性,更快找到全局最优解,但是相应地每次迭代的计算量也会增大;当种群规模增大至一定水平时,再增大将不再有显著的作用。
粒子维度 D :
粒子搜索的空间维数即为自变量的个数。
迭代次数 K :
惯性权重 w :
动态调整惯性权重以平衡收敛的全局性和收敛速度,惯性权重 w 表示上一代粒子的速度对当代粒子的速度的影响,或者说粒子对当前自身运动状态的信任程度,粒子依据自身的速度进行惯性运动。惯性权重使粒子保持运动的惯性和搜索扩展空间的趋势。 w 值越大,探索新区域的能力越强,全局寻优能力越强,但是局部寻优能力越弱。反之,全局寻优能力越弱,局部寻优能力强。较大的 w 有利于全局搜索,跳出局部极值,不至于陷入局部最优;而较小的 w 有利于局部搜索,让算法快速收敛到最优解。当问题空间较大时,为了在搜索速度和搜索精度之间达到平衡,通常做法是使算法在前期有较高的全局搜索能力以得到合适的种子,而在后期有较高的局部搜索能力以提高收敛精度,所以 w 不宜为一个固定的常数.
当 w = 1 时,退化成基本粒子群算法,当 w = 0 时,失去对粒子本身经验的思考。推荐取值范围:[0.4,2],典型取值:0.9、1.2、1.5、1.8
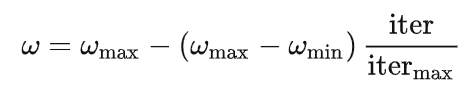
在解决实际优化问题时,往往希望先采用全局搜索 ,使搜索空间快速收敛于某一区域,然后采用局部精细搜索 以获得高精度的解。因此提出了自适应调整的策略,即随着迭代的进行,线性地减小 w 的值。这里提供一个简单常用的方法——线性变化策略:随着迭代次数的增加,惯性权重 w 不断减小,从而使得粒子群算法在初期具有较强的全局收敛能力,在后期具有较强的局部收敛能力。
学习因子 c1和c2
c1 表示粒子下一步动作来源于自身经验部分所占的权重,将粒子推向个体最优位置
c2 表示粒子下一步动作来源于其它粒子经验部分所占的权重,将粒子推向群体最优位置
c1=0:无私型粒子群算法,”只有社会,没有自我”,迅速丧失群体多样性,易陷入局部最优而无法跳出;
c2=0:自我认知型粒子群算法,”只有自我,没有社会”,完全没有信息的社会共享,导致算法收敛速度缓慢;
c1,c2都不为0:完全型粒子群算法,更容易保持收敛速度和搜索效果的均衡,是较好的选择。
低的值使粒子在目标区域外徘徊,而高的值导致粒子越过目标区域。 推荐取值范围:[0,4];典型取值: c1=c2=2、c1=1.6和c2=1.8 、 c1=1.6和c2=2 ,针对不同的问题有不同的取值,一般通过在一个区间内试凑来调整这两个值。
算法中的重要概念
适应值(fitness values)
即优化目标函数的值,用来评价粒子位置的好坏程度,决定是否更新粒子个体的历史最优位置和群体的历史最优位置,保证粒子朝着最优解的方向搜索。
位置限制
速度限制
为了平衡算法的探索能力与开发能力,需要设定一个合理的速度范围,限制粒子的最大速度 vmax ,即粒子下一步迭代可以移动的最大距离。
vmax 较大时,粒子飞行速度快,探索能力强,但粒子容易飞过最优解;
vmax 较小时,飞行速度慢,开发能力强,但是收敛速度慢,且容易陷入局部最优解;
vmax 一般设为粒子变化范围的10%~20%,可根据实际情况调试,但不能大于粒子(解)的变化范围。
优化停止准则
① 最大迭代步数
② 可接受的满意解:上一次迭代后最优解的适应值与本次迭代后最优解的适应值之差小于某个值后停止优化
初始化
需要根据具体的问题进行分析,如果根据我们的经验判断出最优解一定在某个范围内,则就在这个范围内初始化粒子。如果无法确定,则以粒子的取值边界作为初始化范围。
算法实现
使用粒子群算法优化Rosenbrock函数。
Rosenbrock函数的数学表示通常为
Rosenbrock函数是一个非凸函数,通常用于测试优化算法的性能。
找到Rosenbrock函数的最小值
xi ∈[-30,30](i=1,2,3,4),最大速度Vmax = 60,粒子数量为5,维度为6
解: 全局最小值仍然位于一个 n-维数组中的所有元素都等于1的点,此时函数值为0
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 import numpy as npimport matplotlib.pyplot as pltfrom mpl_toolkits.mplot3d import Axes3Ddef fit_fun (x ): return sum (100.0 * (x[0 ][1 :] - x[0 ][:-1 ] ** 2.0 ) ** 2.0 + (1 - x[0 ][:-1 ]) ** 2.0 ) class Particle : def __init__ (self, x_max, max_vel, dim ): self.__pos = np.random.uniform(-x_max, x_max, (1 , dim)) self.__vel = np.random.uniform(-max_vel, max_vel, (1 , dim)) self.__bestPos = np.zeros((1 , dim)) self.__fitnessValue = fit_fun(self.__pos) def set_pos (self, value ): self.__pos = value def get_pos (self ): return self.__pos def set_best_pos (self, value ): self.__bestPos = value def get_best_pos (self ): return self.__bestPos def set_vel (self, value ): self.__vel = value def get_vel (self ): return self.__vel def set_fitness_value (self, value ): self.__fitnessValue = value def get_fitness_value (self ): return self.__fitnessValue class PSO : def __init__ (self, dim, size, iter_num, x_max, max_vel, tol, best_fitness_value=float ('Inf' 2 , C2=2 , W=1 ): self.C1 = C1 self.C2 = C2 self.W_max = W self.W_min = 0.5 self.W = W self.dim = dim self.size = size self.iter_num = iter_num self.x_max = x_max self.max_vel = max_vel self.tol = tol self.best_fitness_value = best_fitness_value self.best_position = np.zeros((1 , dim)) self.fitness_val_list = [] self.Particle_list = [Particle(self.x_max, self.max_vel, self.dim) for i in range (self.size)] def set_bestFitnessValue (self, value ): self.best_fitness_value = value def get_bestFitnessValue (self ): return self.best_fitness_value def set_bestPosition (self, value ): self.best_position = value def get_bestPosition (self ): return self.best_position def update_vel (self, part ): vel_value = self.W * part.get_vel() + self.C1 * np.random.rand() * (part.get_best_pos() - part.get_pos()) \ + self.C2 * np.random.rand() * (self.get_bestPosition() - part.get_pos()) vel_value[vel_value > self.max_vel] = self.max_vel vel_value[vel_value < -self.max_vel] = -self.max_vel part.set_vel(vel_value) def update_pos (self, part ): pos_value = part.get_pos() + part.get_vel() part.set_pos(pos_value) value = fit_fun(part.get_pos()) if value < part.get_fitness_value(): part.set_fitness_value(value) part.set_best_pos(pos_value) if value < self.get_bestFitnessValue(): self.set_bestFitnessValue(value) self.set_bestPosition(pos_value) def update_ndim (self ): for i in range (self.iter_num): self.W = self.W_max - (self.W_max - self.W_min) * i / self.iter_num for part in self.Particle_list: self.update_vel(part) self.update_pos(part) self.fitness_val_list.append(self.get_bestFitnessValue()) print ('第{}次最佳适应值为{}' .format (i, self.get_bestFitnessValue())) if self.get_bestFitnessValue() < self.tol: break return self.fitness_val_list, self.get_bestPosition() if __name__ == '__main__' : pso = PSO(4 , 5 , 10000 , 30 , 60 , 1e-4 , C1=2 , C2=2 , W=1.2 ) fit_var_list, best_pos = pso.update_ndim() print ("最优位置:" + str (best_pos)) print ("最优解:" + str (fit_var_list[-1 ])) plt.plot(range (len (fit_var_list)), fit_var_list, alpha=0.5 )
参考
粒子群优化算法的详细解读 最生动的例子讲述最有效的粒子群优化算法!